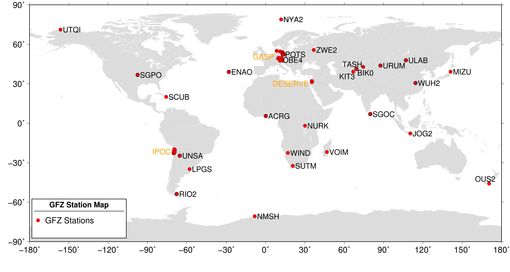
GNSS Station Network
Since the early 1990s, the GFZ has operated a global GNSS station network with currently about 70 stations for precise satellite clock & orbit determination, realization of the terrestrial reference frame, radio occultation measurements or studies on crust dynamics. A subset of these stations contributes also to the tracking networks of the International GNSS Service (IGS) and the EUREF Permanent GNSS Network (EPN). Other stations contribute to GFZ observatories (IPOC, TERENO), to the GPS Atmosphere Sounding Project (GASP), to WMO Global Climate Observing System Reference Upper-Air Network (GRUAN) or other external cooperations. Within the ISDC we offer data of 51 GFZ GNSS stations.
All GFZ stations follows the site guidelines of the International GNSS Service.
Citation: Ramatschi, M; Bradke, M; Nischan, T; Männel, B (2019): GNSS data of the global GFZ tracking network. V. 1. GFZ Data Services. http://doi.org/10.5880/GFZ.1.1.2020.001
Data access 1s (@15minutes) and 30s (@1day) sampled RINEX data can be found here.
Raw data GNSS binary raw observations can be provided upon request.
Real-time streams Real-time streams are available for stations contributing to the IGS. For more details see the website of the IGS real-time working group.
Metadata Station specific metadata can be found at our metadata portal SEMISYS (see also Bradke (2020): SEMISYS - Sensor Meta Information System. V. 4.1. GFZ Data Services. doi.org/10.5880/GFZ.1.1.2020.005)
gfzrnx A toolbox to check, repair, splice and convert GNSS RINEX data provided by GFZ, for more details see Nischan (2016): GFZRNX - RINEX GNSS Data Conversion and Manipulation Toolbox. V. 1.13. GFZ Data Services. doi.org/10.5880/GFZ.1.1.2016.002
GPS L1 C/A navigation message data The daily archives (UNIX tar format) are compiled from up to 32 compressed files (NetCDF format), one for each observed PRN number. Within the individual files GPS L1 C/A navigation data ("navbits") are stored in units of subframes (10 GPS words, each extending over 30 bits). Depending on observation geometry and receiver network status subframes may be recorded multiple times. This subframe multiplicity is available to the user as well. Subframes failing the parity check are excluded from the data set. More details are provided in
Beyerle et al. (2009) A data archive of GPS navigation messages, GPS Solutions, 13 (1), 35-41, doi.org/10.1007/s10291-008-0095-y.
The navbits data set is registered under doi.org/10.1594/GFZ.ISDC.GNSS/GNSS-GPS-1-NAVBIT